Ultrasound Guided Radiation Therapy
Project Description
The compensation of respiratory movements is one of the most challenging areas of research in radiotherapy. For a safe treatment of mobile tumors their position has to be continuously detected and the treatment beam must be adjusted with a short latency according to the motion.
So far, it has not been possible to scan soft tissue in the human body with sufficient accuracy and speed. Clinically used methods today use slow, X-ray and marker-based methods for absolute localization of tumor structures. In addition, external surrogate signals are used to estimate the patient breathing state either to turn the treatment beam on and off (gating), or "guess" the internal tumor position by a correlation model and align the radiation beam.
Both approaches assume a fixed relationship between surrogate signal and tumor position. Errors in recognition of this relationship, or the change of the model over time lead to treatment errors. In addition, there are areas in the human body, which can not be treated by means of correlation-based motion compensation. Especially in areas of cardiovascular and respiratory movement the tumor motion forms a non-linear combination of these motion sources and the computation of a motion model gets impossible or would require a far too high a number of measurement points (x-rays).
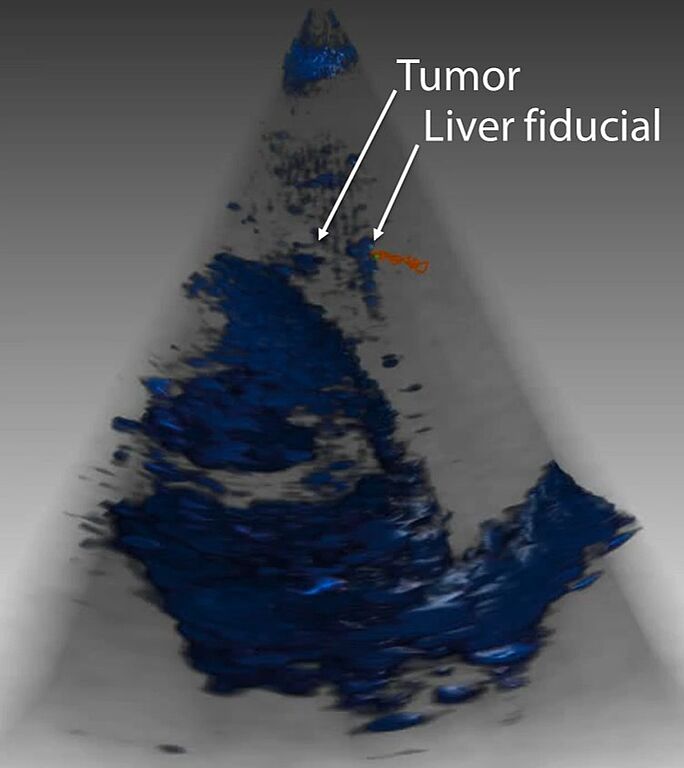
With the development of fast 4D ultrasound equipment the visualization of structures inside the human body with sufficient soft tissue contrast and high update rates became possible. Tumor positions can be located in ultrasound volume and used directly for motion compensation. This technology may replace correlation based motion compensation techniques in the near future.
Areas of Research:
- Target localization in 4d ultrasound
- Computation of optimal transducer positions
- Robotized ultrasound
- Ultrasound guided radiation therapy
Publications
2022
UltrARsound: In-situ visualisation of live ultrasound images using HoloLens 2, International Journal of Computer Assisted Radiology and Surgery , 2022.
| DOI: | 10.1007/s11548-022-02695-z |
| File: | s11548-022-02695-z |
2020
A 3D Slicer module for calibration of spatially tracked 3D ultrasound probes, Munich , 2020. pp. S14-S16.
Learning Local Feature Descriptions in 3D Ultrasound, 2020. pp. 323-330.
| DOI: | 10.1109/BIBE50027.2020.00059 |
| File: | BIBE50027.2020.00059 |
"Rendering of ultrasound volumes on augmented reality glasses" 2020.
Robotized ultrasound imaging of the peripheral arteries -- a phantom study, De Gruyter, 2020. pp. 20200033.
Target tracking accuracy and latency with different 4D ultrasound systems -- a robotic phantom study, Current Directions in Biomedical Engineering , vol. 6, no. 1, 2020.
| File: | article-20200038.xml |
Tracking Performance of 4D Ultrasound Systems with Real-Time Streaming Interfaces - A Robotic Phantom Study, 2020.
Visual servoing for semi-automated 2D ultrasound scanning of peripheral arteries, Infinite Science Publishing GmbH, 2020.
2019
Assessment of 4D Ultrasound Systems for Image-guided Radiation Therapy -- Image Quality, Framerates and CT Artifacts, 2019.
Ergebnisse einer Akzeptanzumfrage zur Roboter-assistierten Ultraschalldiagnostik unter Gefäßmedizinern, in 136. Kongress Deutsche Gesellschaft für Chirurgie , 2019.
MO-K-303-3: Continuous long-term imaging with robotic 4D ultrasound for motion compensation in radiotherapy and beyond, 2019. pp. E287-E288.
Robotics from the bench -- Research for ultrasound automation with augmented reality visualization, 2019.
| File: |
Robust motion tracking of deformable targets in the liver using binary feature libraries in 4D ultrasound, 2019. pp. 601-604.
| DOI: | 10.1515/cdbme-2019-0151 |
| File: | cdbme-2019-0151 |
See what you treat -- 4D ultrasound imaging for real-time motion compensation in the liver, 2019.
SU-F-303-3: Assessment of CT artefacts caused by matrix array transducers for intra-modality registration in 4D ultrasound-guided radiotherapy, 2019. pp. E132-E133.
2018
[I094] Ultrasound guidance in radiotherapy - Renaissance through innovation, in Physica Medica , Elsevier, 2018. pp. 57.
| DOI: | 10.1016/j.ejmp.2018.06.166 |
| File: | j.ejmp.2018.06.166 |
A visual probe positioning tool for 4D ultrasound-guided radiotherapy, 2018. pp. 883-886.
| DOI: | 10.1109/EMBC.2018.8512390 |
| File: | EMBC.2018.8512390 |
Real-Time Streaming of 3D Ultrasound Data to HoloLens, Aachen (Germany) , 2018. pp. S344.
Robotergestützte Ultraschall-Plattform für die Automatisierung und Standardisierung von Screening-Verfahren, 135. Kongress der Deutschen Gesellschaft für Chirurgie , pp. 161, 2018.
| File: | abstract.php |
Streaming of 3D Data from Ultrasound Systems to Augmented Reality Glasses (HoloLens), Leipzig (Germany): Thomas Neumuth, Andreas Melzer, Claire Chalopin, 2018. pp. 2-3.
| ISBN: | 978-3-00-060786-8 |
WE-HI-KDBRB1-02: Characterization of 4D ultrasound systems with streaming interfaces for real-time motion compensation in radiotherapy, in Medical Physics , 2018. pp. E644.
2017
A safety module for active joint limit avoidance and intuitive hand guidance of a robotic ultrasound system, Springer, 2017. pp. 38-39.
Force sensitive robotics for automated ultrasonic diagnostics and therapy, Dresden: De Gruyter, 2017. pp. s103-s108.
Impact of robotic ultrasound image guidance on plan quality in SBRT of the prostate, The British Journal of Radiology , vol. 90, no. 1078, pp. 20160926, 2017.
| DOI: | 10.1259/bjr.20160926 |
| File: | bjr.20160926 |
MO-DE-708-6: In-vivo comparison of real-time 4D ultrasound tracking with electromagnetic transponders in the liver during free breathing, in Medical Physics , 2017. pp. 3069.

Floris Ernst

Gebäude 64
,
Raum 97
floris.ernst(at)uni-luebeck.de
+49 451 31015200
Ralf Bruder

Gebäude 64
,
Raum 92
ralf.bruder(at)uni-luebeck.de
+49 451 31015205
Felix von Haxthausen

Gebäude 64
,
Raum 89
f.freiherrvonhaxthausen(at)uni-luebeck.de
+49 451 31015223