Ultrasound Guided Radiation Therapy
Project Description
The compensation of respiratory movements is one of the most challenging areas of research in radiotherapy. For a safe treatment of mobile tumors their position has to be continuously detected and the treatment beam must be adjusted with a short latency according to the motion.
So far, it has not been possible to scan soft tissue in the human body with sufficient accuracy and speed. Clinically used methods today use slow, X-ray and marker-based methods for absolute localization of tumor structures. In addition, external surrogate signals are used to estimate the patient breathing state either to turn the treatment beam on and off (gating), or "guess" the internal tumor position by a correlation model and align the radiation beam.
Both approaches assume a fixed relationship between surrogate signal and tumor position. Errors in recognition of this relationship, or the change of the model over time lead to treatment errors. In addition, there are areas in the human body, which can not be treated by means of correlation-based motion compensation. Especially in areas of cardiovascular and respiratory movement the tumor motion forms a non-linear combination of these motion sources and the computation of a motion model gets impossible or would require a far too high a number of measurement points (x-rays).
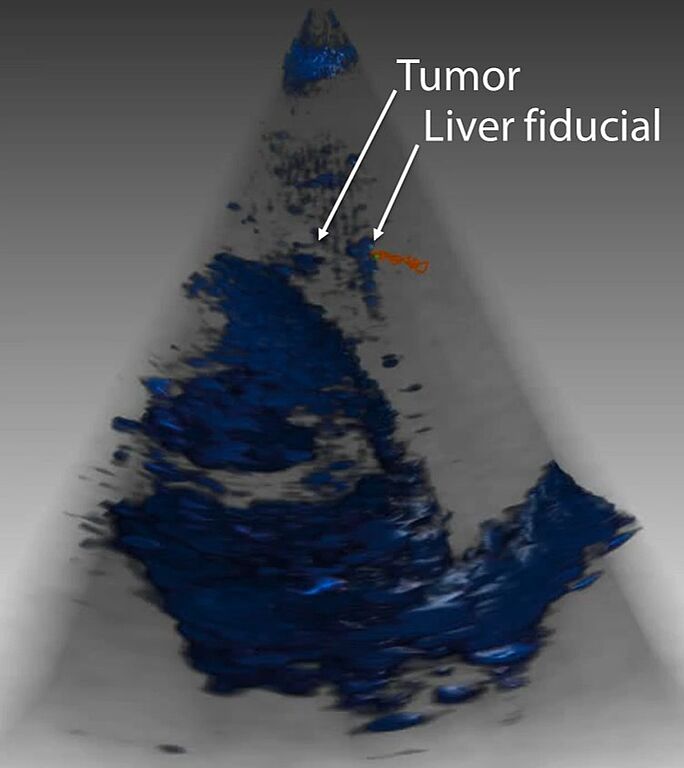
With the development of fast 4D ultrasound equipment the visualization of structures inside the human body with sufficient soft tissue contrast and high update rates became possible. Tumor positions can be located in ultrasound volume and used directly for motion compensation. This technology may replace correlation based motion compensation techniques in the near future.
Areas of Research:
- Target localization in 4d ultrasound
- Computation of optimal transducer positions
- Robotized ultrasound
- Ultrasound guided radiation therapy
Publications
2012
Correlation between external and internal respiratory motion: a validation study, International Journal of Computer Assisted Radiology and Surgery , vol. 7, no. 3, pp. 483-492, 2012. Springer.
| DOI: | 10.1007/s11548-011-0653-6 |
| File: | s11548-011-0653-6 |
Hand-assisted positioning and contact pressure control for motion compensated robotized transcranial magnetic stimulation, Pisa, Italy: Springer Berlin / Heidelberg, 2012. pp. 123-124.
| DOI: | 10.1007/s11548-012-0708-3 |
| File: | s11548-012-0708-3 |
"Robotized 4D Ultrasound for cardiac Image- Guided Radiation Therapy" 2012.
2011
Forecasting Pulsatory Motion for Non-invasive Cardiac Radiosurgery, International Journal of Computer Assisted Radiology and Surgery , vol. 6, no. 1, pp. 93-101, 2011.
| DOI: | 10.1007/s11548-010-0424-9 |
| File: | s11548-010-0424-9 |
High-accuracy ultrasound target localization for hand-eye calibration between optical tracking systems and three-dimensional ultrasound, Handels, Heinz and Ehrhardt, Jan and Deserno, Thomas M. and Meinzer, Hans-Peter and Tolxdorff, Thomas, Eds. Berlin, Heidelberg: Springer, 2011. pp. 179-183.
| DOI: | 10.1007/978-3-642-19335-4_38 |
| ISBN: | 978-3-642-19335-4 |
| File: | 978-3-642-19335-4_38 |
Real-time 4D ultrasound visualization with the Voreen framework, Vancouver, BC, Canada; New York, NY, USA: ACM, 2011. pp. 74:1.
| DOI: | 10.1145/2037715.2037798 |
| ISBN: | 978-1-4503-0971-4 |
| File: | 2037715.2037798 |
SU‐D‐220‐02: Optimal transducer positions for 4D ultrasound guidance in cardiac IGRT, Vancouver, BC, Canada , 2011. pp. 3390.
| DOI: | 10.1118/1.3611550 |
| File: | 1.3611550 |
2009
3D ultrasound-guided motion compensation for intravascular radiation therapy, Berlin, Germany , 2009. pp. 25-26.
| DOI: | 10.1007/s11548-009-0309-y |
| File: | s11548-009-0309-y |
A Validation Framework for Head-Motion Artifacts in Dental Cone-Beam CT, Dössel, O. and Schlegel, Wolfgang C., Eds. Munich, Germany: Springer, 2009. pp. 658-661.
| DOI: | 10.1007/978-3-642-03879-2 |
| File: | 978-3-642-03879-2 |
TH-C-304A-07: Real-Time Tracking of the Pulmonary Veins in 3D Ultrasound of the Beating Heart, Anaheim, CA, USA , 2009. pp. 2804.
| DOI: | 10.1118/1.3182643 |
| File: | 1.3182643 |
Ultrasound tracking for motion compensation in radiation therapy, Lübeck, Germany: Institute for Robotics, University of Lübeck, 2009.

Floris Ernst

Gebäude 64
,
Raum 97
floris.ernst(at)uni-luebeck.de
+49 451 31015200
Ralf Bruder

Gebäude 64
,
Raum 92
ralf.bruder(at)uni-luebeck.de
+49 451 31015205
Felix von Haxthausen

Gebäude 64
,
Raum 89
f.freiherrvonhaxthausen(at)uni-luebeck.de
+49 451 31015223