Ultrasound Guided Radiation Therapy
Project Description
The compensation of respiratory movements is one of the most challenging areas of research in radiotherapy. For a safe treatment of mobile tumors their position has to be continuously detected and the treatment beam must be adjusted with a short latency according to the motion.
So far, it has not been possible to scan soft tissue in the human body with sufficient accuracy and speed. Clinically used methods today use slow, X-ray and marker-based methods for absolute localization of tumor structures. In addition, external surrogate signals are used to estimate the patient breathing state either to turn the treatment beam on and off (gating), or "guess" the internal tumor position by a correlation model and align the radiation beam.
Both approaches assume a fixed relationship between surrogate signal and tumor position. Errors in recognition of this relationship, or the change of the model over time lead to treatment errors. In addition, there are areas in the human body, which can not be treated by means of correlation-based motion compensation. Especially in areas of cardiovascular and respiratory movement the tumor motion forms a non-linear combination of these motion sources and the computation of a motion model gets impossible or would require a far too high a number of measurement points (x-rays).
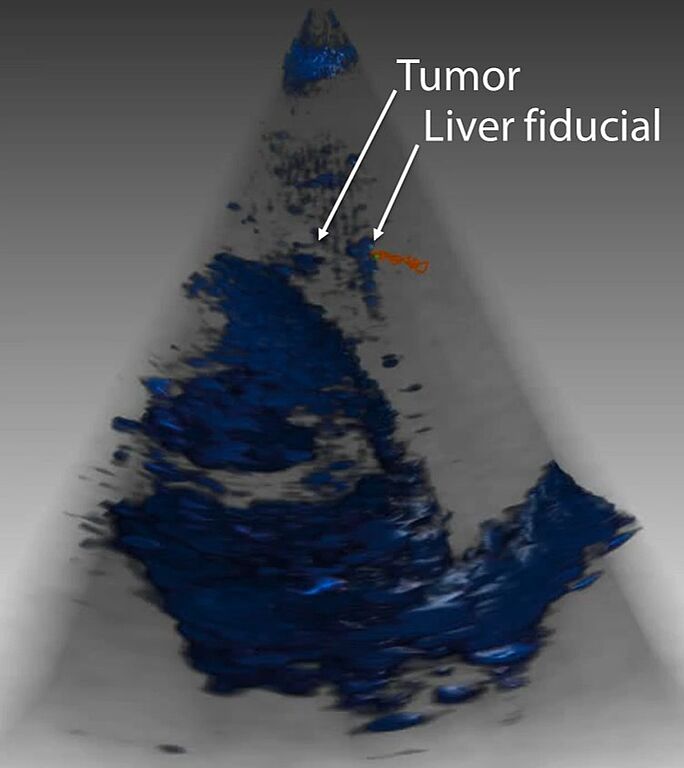
With the development of fast 4D ultrasound equipment the visualization of structures inside the human body with sufficient soft tissue contrast and high update rates became possible. Tumor positions can be located in ultrasound volume and used directly for motion compensation. This technology may replace correlation based motion compensation techniques in the near future.
Areas of Research:
- Target localization in 4d ultrasound
- Computation of optimal transducer positions
- Robotized ultrasound
- Ultrasound guided radiation therapy
Publications
2017
Robotic 4D ultrasound solution for real-time visualization and teleoperation, Current Directions in Biomedical Engineering , vol. 3, no. 2, pp. 559-561, 2017. De Gruyter.
Simultaneous acquisition of 4D ultrasound and wireless electromagnetic tracking for in-vivo accuracy validation, Current Directions in Biomedical Engineering , vol. 3, no. 2, pp. 75-78, 2017.
| DOI: | 10.1515/cdbme-2017-0016 |
| File: | cdbme-2017-0016 |
2016
TH-AB-202-05: BEST IN PHYSICS (JOINT IMAGING-THERAPY): First Online Ultrasound-Guided MLC Tracking for Real-Time Motion Compensation in Radiotherapy, in Medical Physics , 2016. pp. 3857-3857.
| DOI: | 10.1118/1.4958069 |
| File: | 1.4958069 |
Robotic ultrasound-guided SBRT of the prostate: feasibility with respect to plan quality, International Journal of Computer Assisted Radiology and Surgery , pp. 1-11, 2016.
| DOI: | 10.1007/s11548-016-1455-7 |
| File: | s11548-016-1455-7 |
Robotic intra-fractional US guidance for liver SABR: system design, beam avoidance, and clinical imaging, Medical Physics , pp. 5951-5963, 2016.
P28: Towards 6dof tracking of deformable objects for 4D ultrasound-guided radiation therapy, Sydney, Australia: Springer Netherlands, 2016.
| DOI: | 10.1007/s13246-016-0494-2 |
| File: | s13246-016-0494-2 |
Online 4D ultrasound guidance for real-time motion compensation by MLC tracking, Medical Physics , pp. 5695-5704, 2016.
| DOI: | 10.1118/1.4962932 |
| File: | 1.4962932 |
Feasibility of robotic ultrasound guided SBRT of the prostate, Heidelberg , 2016.
An improved tracking framework for ultrasound probe localization in image-guided radiosurgery, Current Directions in Biomedical Engineering , vol. 2, no. 1, pp. 409-413, 2016.
| DOI: | 10.1515/cdbme-2016-0091 |
| File: | cdbme-2016-0091 |
2015
4D Ultrasound Image Guidance for Cardiac Radiosurgery, Cookham, UK , 2015.
Augmented reality system for robotic ultrasound guidance of external beam radiation therapy, Barcelona, Spain , 2015.
Investigation of Treatment Interferences of a Novel Robotic Ultrasound Radiotherapy Guidance System with Clinical VMAT Plans for Liver SBRT Patients, Medical Physics , pp. 3561, 2015.
| DOI: | 10.1118/1.4925372 |
| File: | 1.4925372 |
Patient localization for robotized ultrasound-guided radiation therapy, 2015. pp. 105-112.
Tracking-Precision-Comparison of two High-End-Linear Accelerator means 4D-Motion Platform and high resolution Flat Panel Detector, 2015.
2014
Dose-Escalation Study for Cardiac Radiosurgery in a Porcine Model, International journal of radiation oncology, biology, physics , pp. 89, 2014.
| DOI: | 10.1016/j.ijrobp.2014.02.036 |
| File: | j.ijrobp.2014.02.036 |
Impact of cardiac and respiratory motion during cardiac radiosurgery: a dose accumulation study in a porcine model, Radiotherapy and Oncology , vol. 111, pp. S197-S198, 2014.
| DOI: | 10.1016/S0167-8140(15)30608-3 |
| File: | S0167-8140(15)30608-3 |
WE-G-BRF-09: Force- and Image-Adaptive Strategies for Robotised Placement of 4D Ultrasound Probes, 2014. pp. 523.
| DOI: | 10.1118/1.4889502 |
| File: | 1.4889502 |
2013
Verfahren zum Auffinden der Position eines Schallkopfes, 2013.
Radiosurgery to Create Lesions in the Pulmonary Vein Antrum: Preliminary Results in a Porcine Model and Possible Implications for the Treatment of Atrial Fibrillation, Calsbad, CA, USA: The Radiosurgery Society, 2013.
Pilot-Phantomtest zur ultraschall-geführten robotergestützten Radiochirurgie, Treuer, Harald, Eds. Cologne, Germany , 2013. pp. 122-123.
MO-D-144-02: Ultrasound Transducer Localization Using the CyberKnife's X-Ray System, Indianapolis, IN, USA: American Association of Physicists in Medicine, 2013. pp. 405.
| DOI: | 10.1118/1.4815272 |
| File: | 1.4815272 |
"Force and Image Adaptive Strategies for Robotised Placement of 4D Ultrasound Probes" 2013.
Evaluation of the potential of multi-modal sensors for respiratory motion prediction and correlation, Osaka, Japan , 2013. pp. 5678-5681.
| DOI: | 10.1109/EMBC.2013.6610839 |
| File: | EMBC.2013.6610839 |
Correlation and variation of a multi-modal sensor setup for respiratory motion prediction and correlation, Indianapolis, USA; Indianapolis, IN, USA: American Association of Physicists in Medicine, 2013. pp. 186.
| DOI: | 10.1118/1.4814365 |
| File: | 1.4814365 |
2012
Calibration of Force/Torque and Acceleration for an Independent Safety Layer in Medical Robotic Systems, Cureus , vol. 4, no. 9, pp. e59, 2012.
| DOI: | 10.7759/cureus.59 |
| File: | cureus.59 |

Floris Ernst

Gebäude 64
,
Raum 97
floris.ernst(at)uni-luebeck.de
+49 451 31015208
Ralf Bruder

Gebäude 64
,
Raum 92
ralf.bruder(at)uni-luebeck.de
+49 451 31015205
Felix von Haxthausen

Gebäude 64
,
Raum 89
f.freiherrvonhaxthausen(at)uni-luebeck.de
+49 451 31015223