Modeling of tissue movements and blood flow for valve-preserving reconstruction of the aortic root
Project Description
One possible reason for aortic valve insufficiency is the dilatation of the aortic root. In this case, the aortic root is enlarged but the leaflet shape remains unchanged. This dilatation causes the valve diameter to increase so that the leaflets cannot adjoin each other anymore. Hence, the change of the valve geometry induces an insufficiency. For patients with such a diagnosis, aortic valve reconstruction presents an alternative to valve replacement. The shape of the dilated root is remodeled by attaching the patient's native leaflets to a prosthesis.
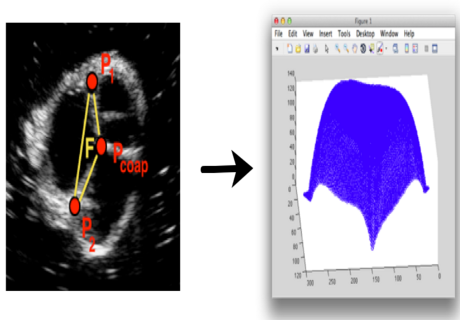
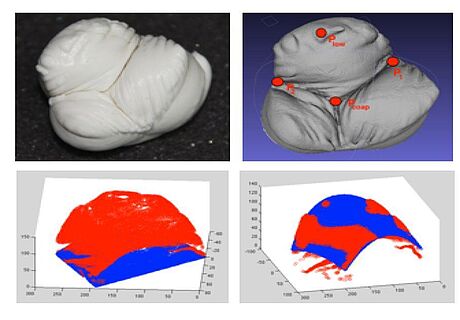
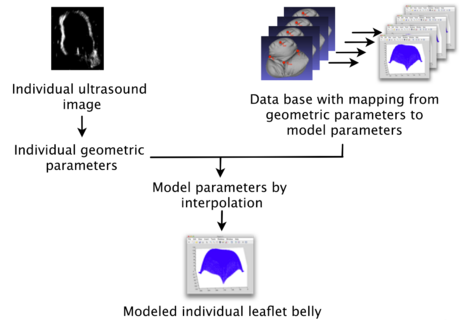
In this project we develop models of the aortic root based on patient-specific geometric features taken from transesophageal (TEE) ultrasound images of the heart. Furthermore, these model will be incorporated into an interactive planning tool, which will allow the surgeon to find the optimal prosthesis for the patient at hand.
Publications
2014
An approach for patient specific modeling of the aortic valve leaflets, GRIN Verlag, 2014.
Treatment planning for cardiac radiosurgery -- initial human simulations, Zürich, Switzerland , 2014.
2013
A setup for ultrasound based assessment of the aortic root geometry, 2013.
An approach to validate ultrasound surface segmentation of the heart, 2013.
"Erstellung eines patientenindividuellen Modells der Aortenklappe" 2013.
Motion compensation of optical mapping signals from isolated beating rat hearts, San Diego, CA: SPIE, 2013. pp. 88561C-1 - 88561C-6.
| DOI: | 10.1117/12.2024847 |
| File: | 12.2024847 |
2012
Computing Synthetic Echocardiography Volumes for Automatic Validation of 3D Segmentation Results, 2012.

- Research
- Robotics Laboratory (RobLab)
- OLRIM
- MIRANA
- Robotik auf der digitalen Weide
- KRIBL
- Ultrasound Guided Radiation Therapy
- Digitaler Superzwilling: Projekt TWIN-WIN
- - Finished Projects -
- High-Accuracy Head Tracking
- Neurological Modelling
- Modelling of Cardiac Motion
- Motion Compensation in Radiotherapy
- Navigation and Visualisation in Endovascular Aortic Repair (Nav EVAR)
- Autonome Elektrofahrzeuge als urbane Lieferanten
- Goal-based Open ended Autonomous Learning
- Transcranial Electrical Stimulation
- Treatment Planning
- Transcranial Magnetic Stimulation
- Navigation in Liver Surgery
- Stereotactic Micronavigation
- Surgical Microscope
- Interactive C-Arm
- OCT-based Neuro-Imaging
Former project members
- Birgit Stender
- Hamid Hadjar
Cooperations
- Part of the LUMEN project