Ultraschallgeführte Strahlenchirurgie
Projektbeschreibung
Die Kompensation von Atembewegungen ist eines der schwierigsten Forschungsgebiete der Strahlentherapie. Für eine zielsichere Behandlung beweglicher Tumore muss deren Position fortlaufend erfasst und der Behandlungsstrahl mit kurzer Latenz auf die Bewegung angepasst werden.
Bislang war es nicht möglich, Weichgewebe im menschlichen Körper mit hinreichender Genauigkeit und Geschwindigkeit abzutasten. Klinisch eingesetzte Verfahren nutzen heutzutage langsame, röntgen- und markerbasierte Verfahren zur Absolutortung von Tumorstrukturen. Zusätzlich werden externe Surrogatsignale verwendet, um abhängig vom Atemzustand des Patienten entweder den Behandlungsstrahl an- und abzuschalten (Gating), oder durch ein Korrelationsmodell die interne Tumorposition zu berechnen und die Strahlenquelle nachzuführen.
Beide Ansätze setzen einen festen Zusammenhang zwischen Surrogatsignal und Tumorposition voraus. Fehler in der Erfassung dieses Zusammenhangs oder die Änderung des Modells über die Zeit führen zu Behandlungsfehlern. Darüber hinaus gibt es Bereiche im menschlichen Körper, die sich nicht mittels korrelationsbasierter Bewegungskompensation behandeln lassen. Besonders in Gebieten mit kardiovaskulärer und respiratorischer Bewegung setzt sich die Tumorbewegung aus einer nichtlinearen Kombination dieser Bewegungsquellen zusammen und die Aufstellung eines Modells ist unmöglich, bzw. würde eine viel zu hohe Anzahl von Messpunkten (Röntgenbildern) erfordern.
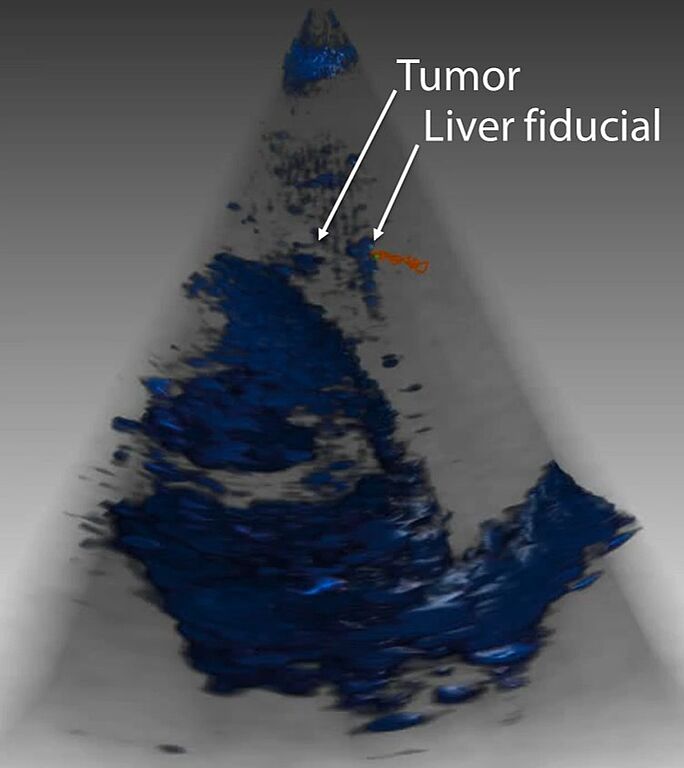
Mit der Entwicklung schneller 4D Ultraschallgeräte besteht neuerdings die Möglichkeit, Strukturen des menschlichen Körpers mit ausreichend Weichgewebekontrast mehrmals pro Sekunde zu erfassen. Tumorpositionen können in Ultraschallvolumen lokalisiert und direkt zur Bewegungskompensation genutzt werden.
Forschungsgebiete:
- Zielverfolgung in Ultraschallvolumen
- Optimierung der Schallkopfposition
- Robotisierte Schallkopfpositionierung
- Ultraschallgeführte Strahlentherapie
Veröffentlichungen
2022
UltrARsound: In-situ visualisation of live ultrasound images using HoloLens 2, International Journal of Computer Assisted Radiology and Surgery , 2022.
| DOI: | 10.1007/s11548-022-02695-z |
| Datei: | s11548-022-02695-z |
2020
A 3D Slicer module for calibration of spatially tracked 3D ultrasound probes, Munich , 2020. pp. S14-S16.
Learning Local Feature Descriptions in 3D Ultrasound, 2020. pp. 323-330.
| DOI: | 10.1109/BIBE50027.2020.00059 |
| Datei: | BIBE50027.2020.00059 |
"Rendering of ultrasound volumes on augmented reality glasses" 2020.
Robotized ultrasound imaging of the peripheral arteries -- a phantom study, De Gruyter, 2020. pp. 20200033.
Target tracking accuracy and latency with different 4D ultrasound systems -- a robotic phantom study, Current Directions in Biomedical Engineering , vol. 6, no. 1, 2020.
| Datei: | article-20200038.xml |
Tracking Performance of 4D Ultrasound Systems with Real-Time Streaming Interfaces - A Robotic Phantom Study, 2020.
Visual servoing for semi-automated 2D ultrasound scanning of peripheral arteries, Infinite Science Publishing GmbH, 2020.
2019
Assessment of 4D Ultrasound Systems for Image-guided Radiation Therapy -- Image Quality, Framerates and CT Artifacts, 2019.
Ergebnisse einer Akzeptanzumfrage zur Roboter-assistierten Ultraschalldiagnostik unter Gefäßmedizinern, in 136. Kongress Deutsche Gesellschaft für Chirurgie , 2019.
MO-K-303-3: Continuous long-term imaging with robotic 4D ultrasound for motion compensation in radiotherapy and beyond, 2019. pp. E287-E288.
Robotics from the bench -- Research for ultrasound automation with augmented reality visualization, 2019.
| Datei: |
Robust motion tracking of deformable targets in the liver using binary feature libraries in 4D ultrasound, 2019. pp. 601-604.
| DOI: | 10.1515/cdbme-2019-0151 |
| Datei: | cdbme-2019-0151 |
See what you treat -- 4D ultrasound imaging for real-time motion compensation in the liver, 2019.
SU-F-303-3: Assessment of CT artefacts caused by matrix array transducers for intra-modality registration in 4D ultrasound-guided radiotherapy, 2019. pp. E132-E133.
2018
[I094] Ultrasound guidance in radiotherapy - Renaissance through innovation, in Physica Medica , Elsevier, 2018. pp. 57.
| DOI: | 10.1016/j.ejmp.2018.06.166 |
| Datei: | j.ejmp.2018.06.166 |
A visual probe positioning tool for 4D ultrasound-guided radiotherapy, 2018. pp. 883-886.
| DOI: | 10.1109/EMBC.2018.8512390 |
| Datei: | EMBC.2018.8512390 |
Real-Time Streaming of 3D Ultrasound Data to HoloLens, Aachen (Germany) , 2018. pp. S344.
Robotergestützte Ultraschall-Plattform für die Automatisierung und Standardisierung von Screening-Verfahren, 135. Kongress der Deutschen Gesellschaft für Chirurgie , pp. 161, 2018.
| Datei: | abstract.php |
Streaming of 3D Data from Ultrasound Systems to Augmented Reality Glasses (HoloLens), Leipzig (Germany): Thomas Neumuth, Andreas Melzer, Claire Chalopin, 2018. pp. 2-3.
| ISBN: | 978-3-00-060786-8 |
WE-HI-KDBRB1-02: Characterization of 4D ultrasound systems with streaming interfaces for real-time motion compensation in radiotherapy, in Medical Physics , 2018. pp. E644.
2017
A safety module for active joint limit avoidance and intuitive hand guidance of a robotic ultrasound system, Springer, 2017. pp. 38-39.
Force sensitive robotics for automated ultrasonic diagnostics and therapy, Dresden: De Gruyter, 2017. pp. s103-s108.
Impact of robotic ultrasound image guidance on plan quality in SBRT of the prostate, The British Journal of Radiology , vol. 90, no. 1078, pp. 20160926, 2017.
| DOI: | 10.1259/bjr.20160926 |
| Datei: | bjr.20160926 |
MO-DE-708-6: In-vivo comparison of real-time 4D ultrasound tracking with electromagnetic transponders in the liver during free breathing, in Medical Physics , 2017. pp. 3069.

Floris Ernst

Gebäude 64
,
Raum 97
floris.ernst(at)uni-luebeck.de
+49 451 31015200
Ralf Bruder

Gebäude 64
,
Raum 92
ralf.bruder(at)uni-luebeck.de
+49 451 31015205
Felix von Haxthausen

Gebäude 64
,
Raum 89
f.freiherrvonhaxthausen(at)uni-luebeck.de
+49 451 31015223