Bestrahlungsplanung in der Strahlenchirugie
Projektbeschreibung

The term radiosurgery refers to very focussed delivery of ionizing radiation in order to treat a target region while sparing surrounding tissue. With the robotic CyberKnife system (Accuray Inc.) a large number of non-coplanar, non-isocentric beams can be generated. While the systems allows for excellent conformality and flexible treatments, the planning problem is challenging. We study various methods to further improve treatment plan optimization.
Interactive treatment planning for radiosurgery
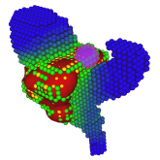
We investigate treatment planning methods, in which the human planner actively interacts with a virtual three-dimensional scene to locally affect the planning outcome, by manipulating the isodose surfaces.
Robotic radiosurgery is characterized by a large number of beams delivered by a robot mounted linear accellerator. While the fexibility in beam delivery allows for very tumor conformal dose distributions it is challenging during treatment planning, where a large optimization problem needs to be solve. We develop efficient beam generation approaches considering the patient geometry and the planning objectives.
4D and 5D planning for radiation therapy
While active beam motion can be used to compensate for the most severe artifacts of organ motion, changes in the target shape or in the motion pattern need to be addressed by adaptive planning methods. 4D planning refers to pre-fraction adaptation to the prevalent motion pattern, and 5D planning to intra-fraction adaptation.

Veröffentlichungen
2011
Three-Dimensional Isodose Surface Manipulation for Multi-Criteria Inverse Planning in Radiosurgery, 2011.
Towards interactive planning for radiotherapy by three-dimensional iso-dose manipulation, 2011.
2007
Interactive Multi-criteria Inverse Planning for Robotic Radiosurgery, Toronto, Canada, , 2007.
Objective specific beam generation for image guide robotic radiosurgery, Berlin , 2007.
2006
3D visualization of radiosurgical treatment plans - experience with Java3D and VTK, Taylor & Francis Group, 2006. pp. 101-106.
| ISBN: | 978-0415-43349-5 |
Computer aided robotic radiosurgery, Computer Aided Surgery , vol. 11, no. 4, pp. 161-174, 2006.
| DOI: | 10.1080/10929080600886393 |
| Datei: | 10929080600886393 |
1995
Robotic Radiosurgery with Beams of Adaptable Shapes, Ayache, Nicholas, Eds. Nice, France: Springer, 1995. pp. 138-149.

- Forschung
- SonoBox: Ein Roboter-Ultraschallsystem zur Diagnose von Unterarmfrakturen bei Kindern
- Robotics Laboratory (RobLab)
- OLRIM
- MIRANA
- Robotik auf der digitalen Weide
- KRIBL
- Ultraschallgeführte Strahlenchirurgie
- Digitaler Superzwilling: Projekt TWIN-WIN
- - Abgeschlossene Projekte -
- Hochpräzise Bewegungsverfolgung am Kopf in der Strahlentherapie
- Neurologische Modellierungen
- Modellierung von Herzbewegungen
- Bewegungskompensation in der Strahlentherapie
- Navigation and Visualisation in Endovascular Aortic Repair (Nav EVAR)
- Autonome Elektrofahrzeuge als urbane Lieferanten
- Ziel-basierendes lebenslanges autonomes Lernen
- Transkranielle Elektrostimulation
- Bestrahlungsplanung
- Transkranielle Magnetstimulation
- Navigation in der Leberchirurgie
- Stereotaktische Mikronavigation
- OP - Mikroskop
- Interaktiver C-Arm
- OCT-basierte Neurobildgebung
Achim Schweikard

Gebäude 64
,
Raum 94
achim.schweikard(at)uni-luebeck.de
+49 451 31015232
Floris Ernst

Gebäude 64
,
Raum 97
floris.ernst(at)uni-luebeck.de
+49 451 31015200