Navigation in der Leberchirurgie
Projektbeschreibung
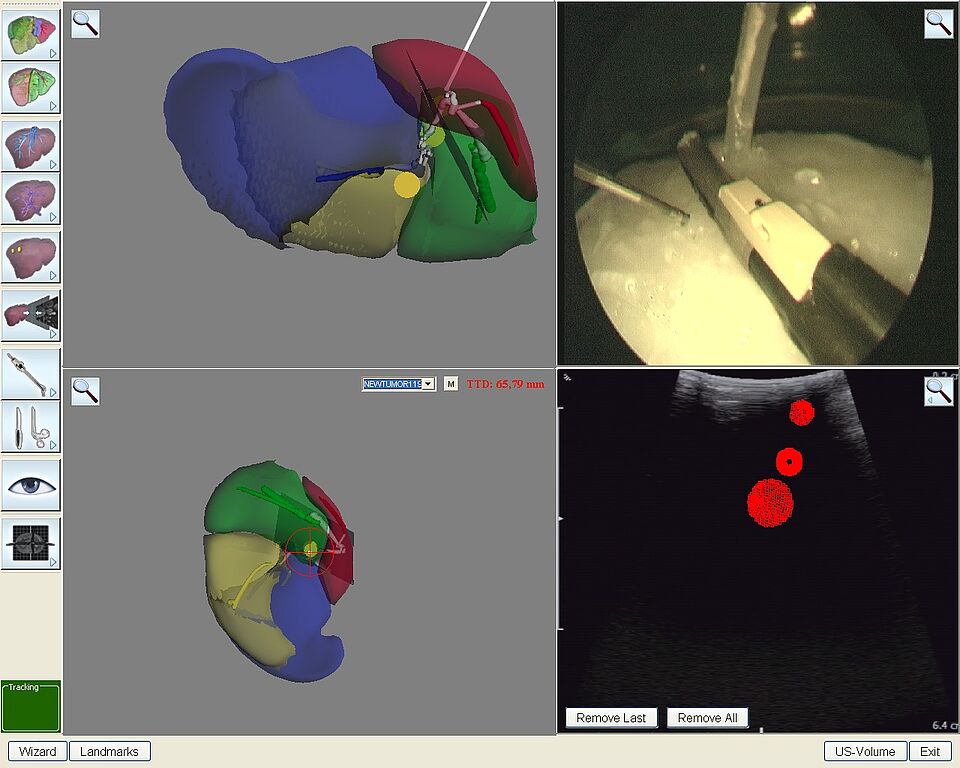
Die laparoskopische Chirurgie bietet die Möglichkeit, Eingriffe an der Leber minimal-invasiv durchzuführen und bietet dadurch Vorteile bei der Versorgung der Patienten. Dem stehen aufgrund fehlender Taktilität und Tiefenwahrnehmung auch nicht unerhebliche Nachteile entgegen, die durch Verwendung eines Navigationssystems teilweise kompensiert werden können.
Im Teilprojektmodul PNT-4 Laparoskopieassistent ist ein Assistenzsystem für die navigierte laparoskopische Leberchirurgie entwickelt worden. Durch Integration von Ultraschallbild-gebung, Laparoskop und Instrumenten können die Nachteile des minimal-invasiven Ansatzes weitgehend kompensiert werden.
Das System hilft den Chirurgen, die präoperativen Planungsdaten mit den intraoperativen Ultraschall- und Videobildern zu fusionieren. Dabei werden mit Hilfe eines elektromagnetischen Lageverfolgungssystems chirurgische Instrumente und Ultraschallsonde navigiert. Das System erfüllt alle wesentlichen Anforderungen, die am Anfang oder im Laufe des Projektes gestellt wurden und wurde unter Qualitäts- und Risikogesichtspunkten validiert. Dadurch konnte die Zulassung für eine klinische Prüfung nach Anhang VIII des MPG erreicht werden.

Veröffentlichungen
2010
LapAssistent -- computer assisted laparoscopic liver surgery, Rostock , 2010.
2008
LapAssistent - a laparoscopic liver surgery assistence system, Magjarevic, Ratko and Sloten, Jos and Verdonck, Pascal and Nyssen, Marc and Haueisen, Jens, Eds. Antwerpen, Belgium: Springer, 2008. pp. 121-125.
| DOI: | 10.1007/978-3-540-89208-3_31 |
| Datei: | 978-3-540-89208-3_31 |
Ein Client-Server Framework für Trackingsysteme in medizinischen Assistenzsystemen, Bartz, Dirk and Bohn, S. and Hoffmann, J., Eds. Leipzig, Germany , 2008. pp. 7-10.
2007
Evaluation und relative Positionskorrektur eines magnetischen Trackingsystems für die minimal-invasive Chirurgie, Karlsruhe , 2007. pp. 271-274.
Videooptische 3D-Lagebestimmung zylinderförmiger Instrumente für die Laparoskopie, Karlsruhe , 2007.
Prototype of an intraoperative navigation and documentation system for laparoscopic radiofrequency ablation: First experiences, European Journal of Surgical Oncology , vol. 34, no. 4, pp. 418-421, 2007.
Navigationsunterstützte Leberchirurgie: Stand der klinischen und experimentellen Forschung, Schleswig-Holsteinisches Ärzteblatt , vol. 10, pp. 51-56, 2007.
Intraoperative documentation of laparoscopic radiofrequency ablation of liver tumors -- First Experiences, Berlin, Germany , 2007.
| Datei: |
Evaluation of an online navigation system for laparoscopic interventions in a perfused ex vivo artificial tumor model of the liver, The Official Journal of the International Hepato Pancreato Biliary Association , vol. 9, no. 3, pp. 190-194, 2007.
| DOI: | 10.1080/13651820601089077 |
| Datei: | 13651820601089077 |
Ein magnetisches Navigationssystem für die minimal-invasive Leberchirurgie, Aachen 2007 , 2007.
Design und Entwicklung von sterilisierbaren Adaptern für navigierte viszerale (Leber) Chirurgie und erste praktische Erfahrungen, Berlin , 2007.
Design and Development of sterilisable adapters for navigated visceral (liver) surgery and first practical experiences, Berlin , 2007.
Design and development of adapters for electromagnetic trackers to perform navigated laparoscopic radiofrequency ablation, Annals of Surgical Innovation and Research , vol. 1, no. 7, 2007.
| DOI: | 10.1186/1750-1164-1-7 |
| Datei: | 1750-1164-1-7 |
Der LapAssistent - Ein System zur Navigation bei laparoskopischen Leberoperationen, Berlin , 2007.
2006
"Die Erfassung des Raumes - Grundlagen der Trackingtechnologie" 2006.
"Entwicklung einer Navigationsumgebung (LapAssistent) für die ultraschallnavigierte laparoskopische Leberchirurgie" 2006.
Entwicklung eines sonografischen Navigationssystems für die Laparoskopie, 2006.
Evaluation of EM tracking systems for laparoscopic liver surgery, Osaka, Japan , 2006.
First results of accuracy of virtual liver cut classification for automatic landmark extraction, 2006.
"Navigationsunterstützte Leberchirurgie: Stand der klinische und experimentellen Forschung" 2006.
2005
Navigation in der Viszeralchirurgie, Berlin , 2005.

- Forschung
- Robotics Laboratory (RobLab)
- OLRIM
- MIRANA
- Robotik auf der digitalen Weide
- KRIBL
- Ultraschallgeführte Strahlenchirurgie
- Digitaler Superzwilling: Projekt TWIN-WIN
- - Abgeschlossene Projekte -
- Hochpräzise Bewegungsverfolgung am Kopf in der Strahlentherapie
- Neurologische Modellierungen
- Modellierung von Herzbewegungen
- Bewegungskompensation in der Strahlentherapie
- Navigation and Visualisation in Endovascular Aortic Repair (Nav EVAR)
- Autonome Elektrofahrzeuge als urbane Lieferanten
- Ziel-basierendes lebenslanges autonomes Lernen
- Transkranielle Elektrostimulation
- Bestrahlungsplanung
- Transkranielle Magnetstimulation
- Navigation in der Leberchirurgie
- Stereotaktische Mikronavigation
- OP - Mikroskop
- Interaktiver C-Arm
- OCT-basierte Neurobildgebung
Achim Schweikard

Gebäude 64
,
Raum 94
achim.schweikard(at)uni-luebeck.de
+49 451 31015200
Floris Ernst

Gebäude 64
,
Raum 97
floris.ernst(at)uni-luebeck.de
+49 451 31015208
Ehemalige Projektmitarbeiter
- Dr.-Ing. Volker Martens
- Dr.-Ing. Osama Shahin
- Armin Besirevic